
- Home
- Kinesiology/Exercise and Sport Science
- Motor Learning and Performance 6th Edition With Web Study Guide-Loose-Leaf Edition

Motor Learning and Performance 6th Edition With Web Study Guide-Loose-Leaf Edition
From Principles to Application
by Richard A. Schmidt and Timothy D. Lee
328 Pages
The sixth edition of Motor Learning and Performance has been carefully revised to incorporate the most important research findings in the field, and it is supplemented with practice situations to facilitate a stronger link between research-based principles and practical applications. Other highlights include the following:
- A web study guide offers updated principles-to-application exercises and additional interactive activities for each chapter, ensuring that students will be able to transfer core content from the book to various applied settings.
- Extensive updates and new material related to the performance of complex movements expand the theoretical focus to a more in-depth analysis of dynamical systems and the constraints-led approach to learning.
- Narratives from Motor Control in Everyday Actions that appear in the web study guide tie each book chapter to concrete examples of how motor behavior is applicable to real life.
- Photo caption activities pose questions to students to encourage critical thinking, and answers to those questions are provided to instructors in the instructor guide.
The sixth edition of Motor Learning and Performance: From Principles to Application goes beyond simply presenting research—it challenges students to grasp the fundamental concepts of motor performance and learning and then go a step further by applying the concepts. Incorporating familiar scenarios brings the material to life for students, leading to better retention and greater interest in practical application of motor performance and learning in their everyday lives and future careers.
Why Study Motor Skills?
The Science of Motor Learning and Performance
Focus on Research 1.1: Paul M. Fitts
Focus on Research 1.2: Franklin M. Henry, Father of Motor Behavior Research
Defining Skills
Components of Skills
Classifying Skills
Measuring Skilled Performance
Understanding Performance and Learning
Summary
Learning Aids
Part I. Principles of Skilled Performance
Chapter 2. Processing Information and Making Decisions
The Information-Processing Approach
Focus on Application 2.1: Intent to Blow Whistle Rule in NHL
Reaction Time and Decision Making
Focus on Research 2.1: Donders’ Stages of Processing
Focus on Research 2.2: Hick’s Law
Focus on Application 2.2: Light Switches
Focus on Research 2.3: Assessing Anticipation Skills
Focus on Application 2.3: Cost/Benefit of Anticipating in Sprint Starting
Memory Systems
Summary
Learning Aids
Chapter 3. Attention and Performance
Focus on Application 3.1: William James on Attention
What Is Attention?
Limitations in Stimulus Identification
Focus on Research 3.1: Automatic Stimulus Processing in Basketball
Limitations in Response Selection
Focus on Research 3.2: Distracted-Driving Research
Limitations in Movement Programming
Focus on Research 3.3: The Double-Stimulation Paradigm
Focus of Attention During Action
Decision Making Under Stress
Focus on Application 3.2: Driver Panic and Unintended Acceleration
Summary
Learning Aids
Chapter 4. Sensory Contributions to Skilled Performance
Sources of Sensory Information
Processing Sensory Information
Focus on Application 4.1: Force Escalation Between Siblings
Principles of Visual Control
Focus on Research 4.1: “Blindsight” Reveals Dorsal and Ventral Stream Processing
Focus on Research 4.2: Gaze Control
Focus on Application 4.2: Visibility in Nighttime Car–Truck Accidents
Audition and Motor Control
Focus on Application 4.3: When Vision Distorts Performance
Summary
Learning Aids
Chapter 5. Motor Programs
Motor Program Theory
Evidence for Motor Programs
Focus on Research 5.1: The Henry–Rogers Experiment
Focus on Application 5.1: Checked Swings in Baseball
Focus on Research 5.2: Initiating a Motor Program
Motor Programs and the Conceptual Model
Problems in Motor Program Theory: Novelty and Storage
Generalized Motor Program Theory
Focus on Research 5.3: Invariances and Parameters
Focus on Application 5.2: Relative-Timing Fingerprints
Focus on Application 5.3: The Stereo System Analogy
Summary
Learning Aids
Chapter 6. Principles of Speed, Accuracy, and Timing
Fitts’ Law
Focus on Research 6.1: The Fitts Tasks
Focus on Application 6.1: Fitts’ Law in Everyday Actions
Schmidt’s Law
Speed–Accuracy Trade-Off Exceptions
Applying the Principles: Baseball Batting
Speed of Initiating Movement
Summary
Learning Aids
Chapter 7. Performance of Complex Movements
Traditional Approaches to Studying Complex Movement
Focus on Application 7.1: The Relative-Age Effect
Coordinating Discrete Movements
Focus on Research 7.1: Coordination in Golf Putting
Coordinating Continuous Movements
Focus on Research 7.2: Relative Phase: An Index of Coordination
Summary
Learning Aids
Part II. Principles of Skill Learning
Chapter 8. Introduction to Motor Learning
Motor Learning Defined
How Is Motor Learning Measured?
Focus on Research 8.1: Learning Curves: Facts or Artifacts?
Distinguishing Learning from Performance
Focus on Application 8.1: Self-Assessments of Learning
Transfer of Learning
Summary
Learning Aids
Chapter 9. The Motor Learning Process
Skill Acquisition
Focus on Research 9.1: Learning Never Ends
Focus on Application 9.1: Fitts and Bernstein on Learning to Play Ice Hockey
Focus on Research 9.2: A Constraints-Led Approach to Baseball Batting
Skill Retention
Skill Transfer
Summary
Learning Aids
Chapter 10. Organizing and Scheduling Practice
Motivation for Learning
Attentional Focus
Demonstrations and Modeling
Mental Practice
Focus on Application 10.1: Mental Practice in Stroke Rehabilitation
Organizing Practice and Rest Periods
Variable and Constant Practice
Focus on Research 10.1: Especial Skills: An Exception to Variable Practice?
Blocked and Random Practice
Summary
Learning Aids
Chapter 11. Augmented Feedback
Feedback Classifications
Functions of Augmented Feedback
Focus on Research 11.1: How Feedback Works
What Feedback to Give
How Much Feedback to Give
Feedback Timing
Focus on Application 11.1: Physical Guidance in Stroke Rehabilitation
Focus on Application 11.2: Physical Guidance in Learning to Swim
Summary
Learning Aids
Richard A. Schmidt, PhD (1941-2015) was a professor emeritus in the department of psychology at UCLA. At the time of his death, Schmidt ran his own business, Human Performance Research, conducting research and consulting in the area of human factors and human performance. Widely acknowledged as one of the leaders in research on motor behavior, he had more than 40 years of experience in the area of motor learning and performance.
The originator of both schema theory and impulse-variability theory (aka “Schmidt’s Law”), he founded the Journal of Motor Behavior in 1969 and was editor for 11 years. He authored the first edition of Motor Control and Learning in 1982 and the first edition of this book, Motor Learning and Performance, in 1991.
Schmidt was highly recognized for his contribution of a lifetime of research and writing. In recognition of his work, he received honorary doctorates from the Catholic University of Leuven in Belgium (in 1992) and the Université Joseph Fourier in France (in 1998). He was a longtime member of the North American Society for the Psychology of Sport and Physical Activity (NASPSPA), where he served as president in 1982 and received the organization’s two highest honors: the Distinguished Scholar Award for lifetime contributions to research in motor control and learning (in 1992) and the President’s Award for significant contributions to the development and growth of NASPSPA (in 2013). He was also a member of the Human Factors and Ergonomics Society and the Psychonomic Society and received the C.H. McCloy Research Lectureship from the American Alliance for Health, Physical Education, Recreation and Dance. His leisure-time passions included sailboat and Porsche racing.
Timothy D. Lee, PhD, is a professor emeritus in the department of kinesiology at McMaster University in Hamilton, Ontario. He has published extensively in motor behavior and psychology journals since 1980, served as an editor for the Journal of Motor Behavior and Research Quarterly for Exercise and Sport, and has been an editorial board member for Psychological Review. Until his retirement in 2014, his research was supported primarily by grants from the Natural Sciences and Engineering Research Council of Canada.
Tim has been a member, secretary-treasurer, and president of the Canadian Society for Psychomotor Learning and Sport Psychology (SCAPPS) and a member of the North American Society for the Psychology of Sport and Physical Activity (NASPSPA), the Psychonomic Society, and the Human Factors and Ergonomics Society. In 1980 Tim received the inaugural Young Scientist Award from SCAPPS, and in 2011 he was named a fellow of the society—its highest honor. He was named an international fellow by the National Academy of Kinesiology in 1999 and awarded the Distinguished Scholar Award by NASPSPA in 2017.
Tim is an avid golfer who competes in local, national, and international tournaments. He teamed with a good friend to win the Ontario Senior Better Ball Championship in 2017.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
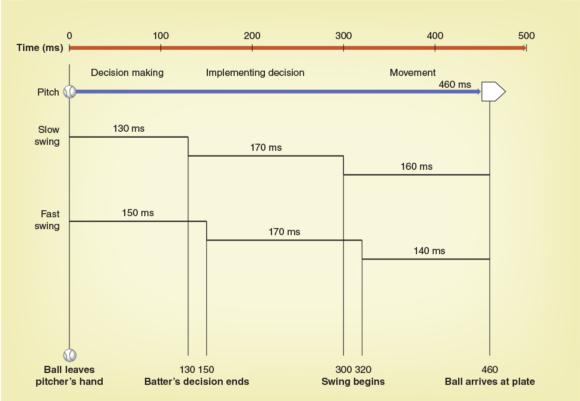
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
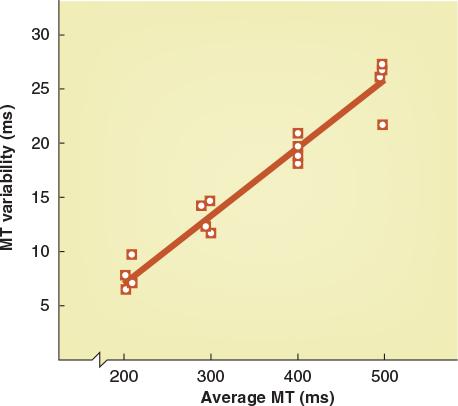
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
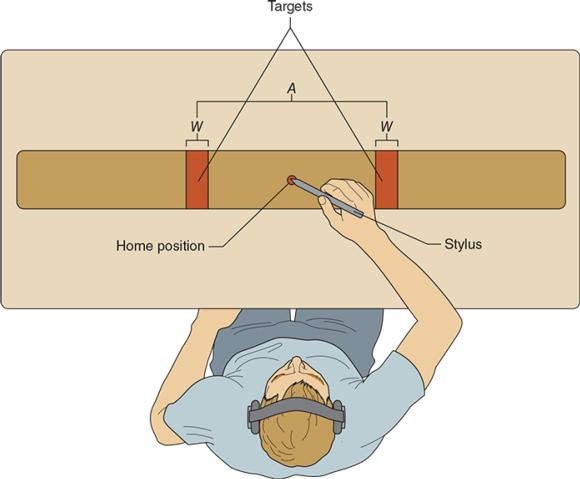
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
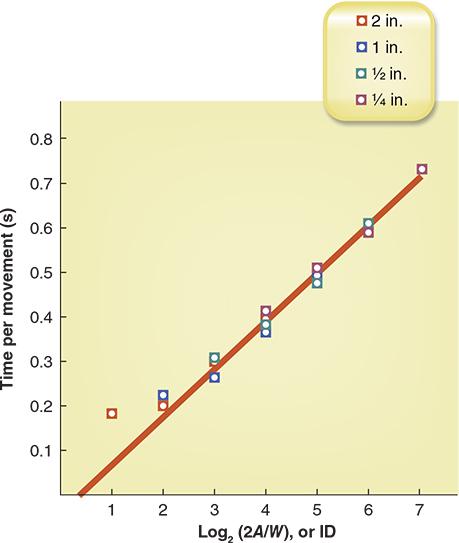
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
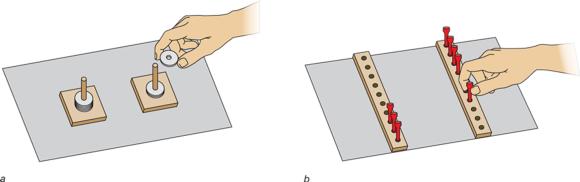
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
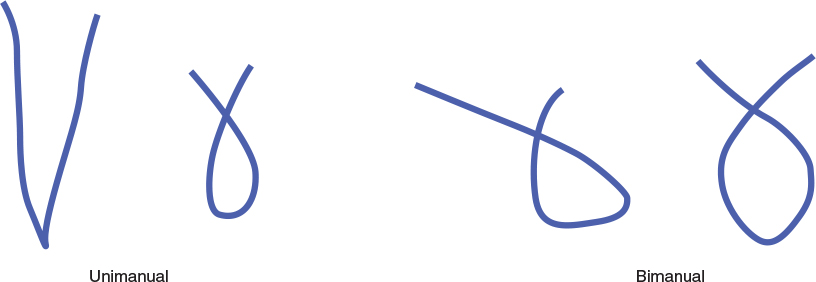
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Applying the Principles: Baseball Batting
It may seem from the previous section that sometimes contradictory principles are involved in these rapid actions. To help in understanding, it will be useful to apply these principles to a familiar task like batting in baseball. This task requires several of the processes discussed so far, such as anticipation and timing, prediction of the ball's spatial trajectory and its arrival time at the coincidence point, and rapid movements that must be both forceful and accurate, so the principles can be applied to various parts of this action. To examine the effects of altering the MT of the swing of the bat, let's assume that some factors are held constant, such as the nature of the pitch and the situation in the game.
A few facts about the timelines involved in hitting a baseball are summarized in figure 6.10. In elite skill-level baseball, a 90 mph (145 kph) pitch requires about 460 ms to travel from the pitcher to the plate, and the MT of the swing of the bat is about 160 ms (Hubbard & Seng, 1954). Evidence presented earlier showed that the internal signal to trigger the swing occurs about 170 ms before the movement starts (Slater-Hammel, 1960; review figure 5.3b and Focus on Research 5.2). With these process durations combined, the signal to trigger the action must be given about 330 ms before the ball arrives at the plate—that is, 170 ms to prepare the swing plus 160 ms to carry it out. Therefore, the decision about whether or not to swing at the ball must be made well before the ball has traveled even halfway to the plate, or after only 130 ms of ball travel. Although some late, visually based corrections in the movement are possible, as discussed in chapter 4, the majority of the action must be planned in advance and initiated by the central nervous system some 330 ms before the ball arrives. Making decisions relative to the occurrence of these critical times plays a decisive role in a batter's success in hitting a pitched ball and also in making changes to an initial decision to swing (see Focus on Application 5.1 for more on checked swings).
Figure 6.10 Timeline of events as a baseball leaves the pitcher's hand and arrives at the plate. The pitch is traveling at a velocity of 90 mph. A fast swing (140 ms) has 20 ms less MT than a slower swing (160 ms).
An important consideration, given the previous discussion of speed and accuracy processes in the chapter, is this: What would happen if the batter could speed up the swing, say from 160 ms to 140 ms? The bat swing's MT could be made shorter through instructions or training to make the actual movement faster, through shortening the movement distance by reducing the backswing (a very slight effect), through using a lighter bat, or through changing the biomechanics of the movement in various ways. Reducing the bat swing MT by 20 ms would have important implications for several separate factors discussed in the previous few sections.
Visual Processing Time
Figure 6.10 shows that shortening the MT delays the beginning of the swing, hence the point at which the details of the action have to be specified, to a position several feet later in the ball's flight. This provides additional time for viewing the ball's trajectory and for determining time to contact, and should allow more accurate anticipation of where and when the ball will arrive. And this extra information comes at a point that is maximally useful—when the ball is closer to the batter—making these extra 20 ms of viewing time particularly beneficial. Therefore, shortening the MT should provide more effective anticipation of the ball's trajectory.
Swing-Initiation Timing Accuracy
If the swing of the bat is speeded up, the decision about when to initiate the movement is made later and is more temporally accurate. In an experiment on a simulated batting task, shortening the MT stabilized the initiation time of the movement, as if the batter were more certain of when to start the swing (Schmidt, 1969). Starting the swing at a more stable time therefore translates into a more stable time for the movement end point at the plate, which yields greater movement timing accuracy.
Movement Timing Accuracy
One process the batter must go through in planning the swing is to estimate the duration of his own movement. Poulton (1974) termed this “effector anticipation.” Therefore, the batter selects a MT, then initiates this action at such a time that the middle of the movement coincides with the arrival of the ball at the plate. If the actual MT is different from the one predicted, the middle of the movement will be too early or late, causing timing errors in hitting the ball. Because reduced MT increases movement timing consistency (figure 6.11), the movement's actual duration will be closer to the batter's estimate. This will result in greater accuracy in hitting the ball, particularly in terms of the timing aspects (see also Schmidt, 1969).
Figure 6.11 The effect of average MT duration on the variability of timing. As MT decreases (i.e., movements are made faster), the variability of timing decreases (i.e., becomes more stable).
Movement Spatial Accuracy
Making the movement faster also influences spatial accuracy, as discussed earlier. If the movement is already relatively slow, instructions to decrease the MT have a detrimental effect on accuracy in hitting the ball. However, most bat swing movements are already quite fast, near the performer's limits in producing force. Recall that when movements are very fast and forceful, reducing the MT tends to increase—not decrease—accuracy (figure 6.11), because the force variability decreases in this range with decreases in MT (figure 6.6). Therefore, reducing the MT when it is already quite short results in improved spatial accuracy, giving more frequent ball contact.
Ball Impact
Finally, of course, a faster swing gives more impact to the ball if it is hit—a critical factor in the particular game of baseball. Increasing the load by having a heavier bat can improve spatial accuracy (Schmidt & Sherwood, 1982) and would have only minimal negative effects on movement speed. Clearly, both added bat mass and a faster MT contribute to greater impact with the ball if and when it is hit.
Nearly every factor associated with decreased bat swing MT discussed here would be expected to influence the chances of hitting the ball. Perhaps understanding these factors makes it clearer why professional batters seem to swing with near maximal speeds.
Understanding Fitts' Law
Fitts' Law
Fitts used a paradigm in which the participant tapped alternately between two target plates as quickly as possible. The separation between the targets (termed A, for movement amplitude) and the width of the targets (termed W, for target width) could be varied in different combinations (see figure 6.1). The movement time (MT) taken to complete these rapid taps increased systematically with either increases in the movement amplitude (due to a larger distance between the targets) or decreases in the target width (due to a smaller target-landing area). These relationships were combined into a formal mathematical statement that is now known as Fitts' Law (see Focus on Research 6.1).
Figure 6.1 Illustration of a participant performing a Fitts tapping task. The participant taps between two targets of varying width (W) and with varying amplitude between them (A), attempting to move as rapidly as possible while keeping the number of target misses to a minimum.
Fitts' Law states that MT is constant whenever the ratio of the movement amplitude (A) to target width (W) remains constant. So, very long movements to wide targets require about the same time as very short movements to narrow targets. In addition, Fitts found that the MT increased as the ratio of A to W increased by either making A larger, making W smaller, or both. He combined these various effects into a single equation:
MT = a + b [Log2(2A/W)]
where a (the MT-intercept) and b (the slope) are constants, and A and W are defined as before. The relationships between A, W, and MT are plotted in figure 6.2 for one of Fitts' data sets. The term Log2(2A/W) is referred to as the index of difficulty (abbreviated ID), which seems to define the difficulty of the various combinations of A and W. Therefore, Fitts' Law says that MT is linearly related to the Log2(2A/W), or simply, that MT is linearly related to the index of difficulty (ID).
Figure 6.2 Average movement time (MT) as a function of the index of difficulty (ID).
Focus on Research 6.1
The Fitts Tasks
In his most well-known experiment, Fitts (1954) asked participants to make movements of a handheld stylus between two target plates. In this task, which is now typically known as the Fitts tapping task (see figure 6.1), the widths (W) of each target and the amplitude (A) between the targets were varied in different combinations, and the participant's goal was to alternately tap each target as quickly as possible while making as few errors as possible (missed targets < 5%). The experimenter would measure the number of taps completed in, say, a 20 s trial, and then compute the average time per movement, or movement time (MT).
However, this target-tapping paradigm was not the only way that Fitts studied rapid aiming. Figure 6.3 illustrates two other tasks used in Fitts (1954) research. In figure 6.3a, the participant's task was to move small metal discs with holes in the center (like carpenters' washers) from one peg to another. In figure 6.3b, the task was to move small pins from one hole to another. In both of these task variations, Fitts redefined target width (W) in terms of the tolerance between the discs and target pegs (figure 6.3a) or the diameter of the holes in the plate in relation to the diameter of the pin (figure 6.3b). With ID defined in this manner, Fitts found that the same equation—MT = a + b (ID)—held well in accounting for the effects of the task parameters of movement speed.
How do all of these experimental tasks converge to define Fitts' Law? The first part is easy—amplitude is the distance-covering portion of MT and is common to each task. The effect of target size is more complicated. In the aiming task, this is essentially just target width. However, in the disc-transfer (figure 6.3a) and pin-transfer tasks (figure 6.3b), the target size is operationalized as the difference between sizes of the object and the target. For example, in the pin-transfer task, a large hole only represents an easy ID if the pin being inserted is relatively narrow. If the pin is wide, then the task becomes more difficult because there is less tolerance for error. Thus, all three of these tasks converge upon the central problem of the speed-accuracy trade-off—how the task parameters cause the participant to vary MT in order to make the end product of the aimed movement accurate.
Figure 6.3 Alternative reciprocal-movement tasks used by Fitts (1954): (a) disc-transfer task, (b) pin-transfer task.
Exploring Further
What would be the ID for a tapping task that had W = 4 and A = 16?
What changes in the foot's travel time from the accelerator to the brake pedal would you expect to see if you doubled the size of the brake pedal?
An important point is that Fitts' Law describes the tendency for performers to trade speed for accuracy. In what has now become the typical Fitts tapping task, participants are told to minimize the number of target misses. In other words, they are instructed to adjust MT so that the errors are acceptably small. Thus, when the target size is increased, the accuracy requirements are relaxed and MTs are smaller than when narrow targets are used. This has led to the general notion of a speed-accuracy trade-off—the tendency for people to sacrifice or trade off speed in order to maintain acceptable levels of accuracy—as one of the most fundamental principles of movement behavior.
Fitts' Law, which describes MT as a function of the movement distance and the accuracy requirements of a task, has been found to hold under many different environmental conditions (e.g., tapping underwater or in outer space), for many different classifications of people (e.g., children, older adults, individuals with neurological impairments), and for movements made with different effectors (e.g., handheld, foot-held, head-mounted pointing devices) (see Schmidt et al., 2019; Plamondon & Alimi, 1997). Fitts' Law also applies to how movement speed is controlled in many tasks of everyday living (see Focus on Application 6.1).
The movements studied with the Fitts tapping task are almost always blends of programmed actions with feedback corrections added near the end to land on the target. That is, in these movements the performer generates a programmed initial segment of the action toward the target, probably processes visual feedback about the accuracy of this action during the movement, and initiates one (or sometimes more) feedback-based corrections to guide the limb to the target area (Elliott et al., 2017). As discussed in chapter 4, such visual compensations are probably processed through the dorsal visual stream and might not be controlled consciously. Thus, Fitts' Law describes the effectiveness of the combined open- and closed-loop processes that operate in these common kinds of actions, where potentially all of the open- and closed-loop processes shown in the conceptual model in figure 4.10 are operating together.
Finally, it is reasonable to suspect that slower movements are more accurate, at least in part, because there is more time available to detect errors and to make corrections (as discussed in chapter 4), and that MT lengthens when the number of corrections to be made increases. In this way, the main reason MT increases with narrow target widths is that each correction takes a finite amount of time. Meyer and colleagues (1988) and Elliott et al. (2017) have developed formal models of the processes involved in the speed-accuracy trade-off that extends our understanding of Fitts' principles.
Wishing to extend their ideas to tasks that are more typical and realistic, Fitts and Peterson (1964) used the same idea and variables as in the reciprocal-tapping task (figure 6.1), but used them with movements in which a single action was required from a starting position to a single target. Similar to the reciprocal-tapping task, these targets were located various distances (A) from the starting position and were of different sizes (W). Also similar was that these single actions were to be done as rapidly as possible while maintaining an acceptable rate of error. The independent variables A and W and the dependent variable MT were related to each other in essentially the same way as they were in the reciprocal task. That is to say, the equation for Fitts' Law also applied to the single-movement paradigm, which increases our confidence that Fitts' Law is one of the truly fundamental laws of motor behavior.
In brief, Fitts' Law tells us the following:
- Movement time (MT) increases as the movement amplitude (A) increases.
- MT increases as the aiming accuracy requirement increases, that is, as target width (W) decreases.
- MT is essentially constant for a given ratio of movement amplitude (A) to target width (W).
- These principles are valid for a wide variety of conditions, participant variables, tasks or paradigms, and body parts used.
However, a number of other questions remained unanswered. What about movements that are completed in a very short period of time, where presumably no feedback is involved during the movement? How can MT depend on the number of corrections when there is not enough time to make even a single correction? Some of these questions are answered in the next section.
Try the γ-V experiment
The γ-V Experiment
Try this simple experiment for yourself. Draw small figures that represent the Greek letter gamma (γ) on a tablet, whiteboard, or sheet of paper taped to your desk. Draw the γ relatively quickly, without modification during its production. The figure must cross over near the center and have a rounded bottom. When you can do this effectively, use the other hand to draw regular Vs. The procedure is the same as before except that now the figure must not cross over itself and must have a pointed bottom. Based on chapter 5, each figure is represented by its own motor program because the temporal structures for the two figures are different: down-up for the V and down-over-up for the γ. Most people do not have any trouble producing these figures when each is drawn on its own, as in the left side of figure 7.2 (unimanual).
Figure 7.2 The γ-V task. Participants are asked to produce the capital letter V with the left hand and the Greek letter gamma (γ) with the right hand. In unimanual trials only one letter is written at a time; in the bimanual trials both letters are written simultaneously.
Now try to produce these two figures together, using the same hands as before. You will find, as Bender (1987) did, that doing both tasks at the same time is very difficult, with results such as those shown in the right side of figure 7.2 (bimanual). Most people make the same figure with both hands or at least they produce certain features of one of the different figures with both hands (e.g., a rounded bottom). Clearly, the fact that the participants could produce these actions unimanually was evidence that there was a separate motor program available for each. But, even after considerable practice, most people cannot do this dual task effectively. This demonstration indicates that, even with separate programs for producing a V and a γ, these programs cannot be executed independently at the same time.
These findings, together with the results from Kelso and coauthors (1979, 1983) presented in the previous sections, can be interpreted to suggest that the motor system can produce only a single motor program at one time. This is an extension of the idea expressed earlier that the movement programming stage could organize only a single movement at a time, after completion of the other stages. But now the focus is on the production of the movement itself. When two independent programs would be best suited for the upcoming task requirements, instead, the system responds with a hybrid solution that attempts to control both limbs similarly.
Related Books









